18 KiB
Triggering events based on the presence of people has been the dream of many geeks and DIY automation junkies for a while. Having your house to turn the lights on or off when you enter or exit your living room is an interesting application, for instance. Most of the solutions out there to solve these kinds of problems, even more high-end solutions like the Philips Hue sensors, detect motion, not actual people presence — which means that the lights will switch off once you lay on your couch like a sloth. The ability to turn off music and/or tv when you exit the room and head to your bedroom, without the hassle of switching all the buttons off, is also an interesting corollary. Detecting the presence of people in your room while you’re not at home is another interesting application.
Thermal cameras coupled with deep neural networks are a much more robust strategy to actually detect the presence of people. Unlike motion sensors, they will detect the presence of people even when they aren’t moving. And unlike optical cameras, they detect bodies by measuring the heat that they emit in the form of infrared radiation, and are therefore much more robust — their sensitivity doesn’t depend on lighting conditions, on the position of the target, or the colour. Before exploring the thermal camera solution, I tried for a while to build a model that instead relied on optical images from a traditional webcam. The differences are staggering: I trained the optical model on more than ten thousands 640x480 images taken all through a week in different lighting conditions, while I trained the thermal camera model on a dataset of 900 24x32 images taken during a single day. Even with more complex network architectures, the optical model wouldn’t score above a 91% accuracy in detecting the presence of people, while the thermal model would achieve around 99% accuracy within a single training phase of a simpler neural network. Despite the high potential, there’s not much out there in the market — there’s been some research work on the topic (if you google “people detection thermal camera” you’ll mostly find research papers) and a few high-end and expensive products for professional surveillance. In lack of ready-to-go solutions for my house, I decided to take on my duty and build my own solution — making sure that it can easily be replicated by anyone.
Prepare the hardware
For this example we'll use the following hardware:
-
A RaspberryPi (cost: around $35). In theory any model should work, but it’s probably not a good idea to use a single-core RaspberryPi Zero for machine learning tasks — the task itself is not very expensive (we’ll only use the Raspberry for doing predictions on a trained model, not to train the model), but it may still suffer some latency on a Zero. Plus, it may be really painful to install some of the required libraries (like Tensorflow or OpenCV) on the
arm6architecture used by the RaspberryPi Zero. Any better performing model (from RPi3 onwards) should definitely do the job. -
A thermal camera. For this project, I’ve used the MLX90640 Pimoroni breakout camera (cost: $55), as it’s relatively cheap, easy to install, and it provides good results. This camera comes in standard (55°) and wide-angle (110°) versions. I’ve used the wide-angle model as the camera monitors a large living room, but take into account that both have the same resolution (32x24 pixels), so the wider angle comes with the cost of a lower spatial resolution. If you want to use a different thermal camera there’s not much you’ll need to change, as long as it comes with a software interface for RaspberryPi and it’s compatible with Platypush.
Setting up the MLX90640 on your RaspberryPi if you have a Breakout Garden it’s easy as a pie. Fit the Breakout Garden on top of your RaspberryPi. Fit the camera breakout into an I2C slot. Boot the RaspberryPi. Done. Otherwise, you can also connect the device directly to the RaspberryPi I2C interface, either using the right hardware PINs or the software emulation layer.
Prepare the software
I tested my code on Raspbian, but with a few minor modifications it should be easily adaptable to any distribution installed on the RaspberryPi.
The software support for the thermal camera requires a bit of work. The MLX90640 doesn’t come (yet) with a Python ready-to-use interface, but a C++ open-source driver is provided - and that's the driver that is wrapped by the Platypush integration. Instructions to install it:
# Install the dependencies
[sudo] apt-get install libi2c-dev
# Enable the I2C interface
echo dtparam=i2c_arm=on | sudo tee -a /boot/config.txt
# It's advised to configure the SPI bus baud rate to
# 400kHz to support the higher throughput of the sensor
echo dtparam=i2c1_baudrate=400000 | sudo tee -a /boot/config.txt
# A reboot is required here if you didn't have the
# options above enabled in your /boot/config.txt
[sudo] reboot
# Clone the driver's codebase
git clone https://github.com/pimoroni/mlx90640-library
cd mlx90640-library
# Compile the rawrgb example
make clean
make bcm2835
make I2C_MODE=LINUX examples/rawrgb
If it all went well you should see an executable named rawrgb under the examples directory. If you run it you should
see a bunch of binary data — that’s the raw binary representation of the frames captured by the camera. Remember where
it is located or move it to a custom bin folder, as it’s the executable that platypush will use to interact with the
camera module.
This post assumes that you have already installed and configured Platypush on your system. If not, head to my post on getting started with Platypush, the readthedocs page, the Gitlab page or the wiki.
Install also the Python dependencies for the HTTP server, the MLX90640 plugin and Tensorflow:
[sudo] pip install 'platypush[http,tensorflow,mlx90640]'
Heading to your computer (we'll be using it for building the model that will be used on the RaspberryPi), install OpenCV, Tensorflow and Jupyter and my utilities for handling images:
# For image manipulation
[sudo] pip install opencv
# Install Jupyter notebook to run the training code
[sudo] pip install jupyterlab
# Then follow the instructions at https://jupyter.org/install
# Tensorflow framework for machine learning and utilities
[sudo] pip install tensorflow numpy matplotlib
# Clone my repository with the image and training utilities
# and the Jupyter notebooks that we'll use for training.
git clone https://github.com/BlackLight/imgdetect-utils
Capturing phase
Now that you’ve got all the hardware and software in place, it’s time to start capturing frames with your camera and use
them to train your model. First, configure
the MLX90640 plugin in your
Platypush configuration file (by default, ~/.config/platypush/config.yaml):
# Enable the webserver
backend.http:
enabled: True
camera.ir.mlx90640:
fps: 16 # Frames per second
rotate: 270 # Can be 0, 90, 180, 270
rawrgb_path: /path/to/your/rawrgb
Restart the service, and if you haven't already create a user from the web interface at http://your-rpi:8008. You
should now be able to take pictures through the API:
curl -XPOST -H 'Content-Type: application/json' -d '
{
"type":"request",
"action":"camera.ir.mlx90640.capture",
"args": {
"output_file":"~/snap.png",
"scale_factor":20
}
}' -a 'username:password' http://localhost:8008/execute
If everything went well, the thermal picture should be stored under ~/snap.png. In my case it looks like this while
I’m in standing front of the sensor:
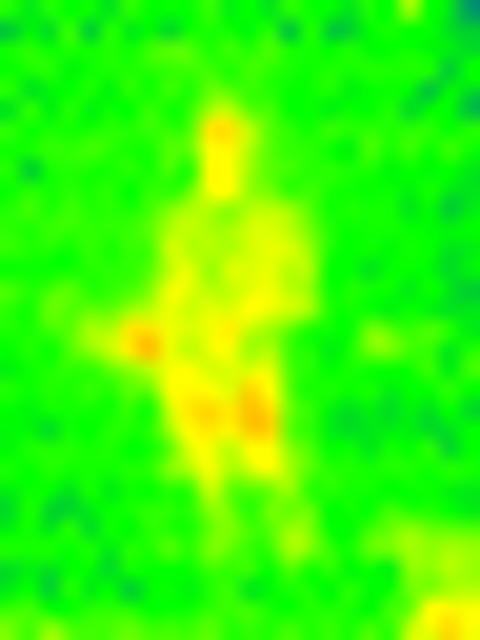
Notice the glow at the bottom-right corner — that’s actually the heat from my RaspberryPi 4 CPU. It’s there in all the images I take, and you may probably see similar results if you mounted your camera on top of the Raspberry itself, but it shouldn’t be an issue for your model training purposes.
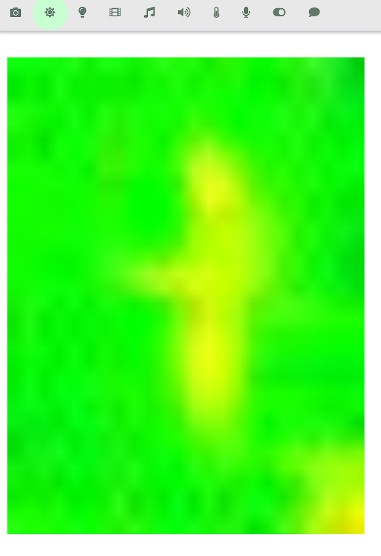
If you open the web panel (http://your-host:8008) you’ll also notice a new tab, represented by the sun icon, that you
can use to monitor your camera from a web interface.
You can also monitor the camera directly outside of the webpanel by pointing your browser to
http://your-host:8008/camera/ir/mlx90640/stream?rotate=270&scale_factor=20.
Now add a cronjob to your config.yaml to take snapshots every minute:
cron.ThermalCameraSnapshotCron:
cron_expression: '* * * * *'
actions:
- action: camera.ir.mlx90640.capture
args:
output_file: "${__import__(’datetime’).datetime.now().strftime(’/your/img/folder/%Y-%m-%d_%H-%M-%S.jpg’)}"
grayscale: true
Or directly as a Python script under e.g. ~/.config/platypush/thermal.py (make sure that ~/.config/platypush/__init__.py also exists so the folder is recognized as a Python module):
from datetime import datetime
from platypush.config import Config
from platypush.cron import cron
from platypush.utils import run
@cron('* * * * *')
def take_thermal_picture(**context):
run('camera.ir.mlx90640.capture', grayscale=True,
output_file=datetime.now().strftime('/your/img/folder/%Y-%m-%d_%H-%m-%S.jpg'))
The images will be stored under /your/img/folder in the format
YYYY-mm-dd_HH-MM-SS.jpg. No scale factor is applied — even if the images will
be tiny we’ll only need them to train our model. Also, we’ll convert the images
to grayscale — the neural network will be lighter and actually more accurate,
as it will only have to rely on one variable per pixel without being tricked by
RGB combinations.
Restart Platypush and verify that every minute a new picture is created under your images directory. Let it run for a few hours or days until you’re happy with the number of samples. Try to balance the numbers of pictures with no people in the room and those with people in the room, trying to cover as many cases as possible — e.g. sitting, standing in different points of the room etc. As I mentioned earlier, in my case I only needed less than 1000 pictures with enough variety to achieve accuracy levels above 99%.
Labelling phase
Once you’re happy with the number of samples you’ve taken, copy the images over
to the machine you’ll be using to train your model (they should be all small
JPEG files weighing under 500 bytes each). Copy them to the folder where you
have cloned my imgdetect-utils repository:
BASEDIR=~/git_tree/imgdetect-utils
# This directory will contain your raw images
IMGDIR=$BASEDIR/datasets/ir/images
# This directory will contain the raw numpy training
# data parsed from the images
DATADIR=$BASEDIR/datasets/ir/data
mkdir -p $IMGDIR
mkdir -p $DATADIR
# Copy the images
scp pi@raspberry:/your/img/folder/*.jpg $IMGDIR
# Create the labels for the images. Each label is a
# directory under $IMGDIR
mkdir $IMGDIR/negative
mkdir $IMGDIR/positive
Once the images have been copied and the directories for the labels created,
run the label.py script provided in the repository to interactively label the
images:
cd $BASEDIR
python utils/label.py -d $IMGDIR --scale-factor 10
Each image will open in a new window and you can label it by typing either 1 (negative) or 2 (positive) - the label names are gathered from the names of the directories you created at the previous step:

At the end of the procedure the negative and positive directories under the
images directory should have been populated.
Training phase
Once we’ve got all the labelled images it’s time to train our model. A
train.ipynb
Jupyter notebook is provided under notebooks/ir and it should be
relatively self-explanatory:
### Import stuff
import os
import sys
import numpy as np
import tensorflow as tf
from tensorflow import keras
######
# Change this with the directory where you cloned the imgdetect-utils repo
basedir = os.path.join(os.path.expanduser('~'), 'git_tree', 'imgdetect-utils')
sys.path.append(os.path.join(basedir))
from src.image_helpers import plot_images_grid, create_dataset_files
from src.train_helpers import load_data, plot_results, export_model
# Define the dataset directory - replace it with the path on your local
# machine where you have stored the previously labelled dataset.
dataset_dir = os.path.join(basedir, 'datasets', 'ir')
# Define the size of the input images. In the case of an
# MLX90640 it will be (24, 32) for horizontal images and
# (32, 24) for vertical images
image_size = (32, 24)
# Image generator batch size
batch_size = 64
# Number of training epochs
epochs = 5
######
# The Tensorflow model and properties file will be stored here
tf_model_dir = os.path.join(basedir, 'models', 'ir', 'tensorflow')
tf_model_file = os.path.join(tf_model_dir, 'ir.pb')
tf_properties_file = os.path.join(tf_model_dir, 'ir.json')
# Base directory that contains your training images and dataset files
dataset_base_dir = os.path.join(basedir, 'datasets', 'ir')
dataset_dir = os.path.join(dataset_base_dir, 'data')
# Store your thermal camera images here
img_dir = os.path.join(dataset_base_dir, 'images')
### Create model directories
os.makedirs(tf_model_dir, mode=0o775, exist_ok=True)
### Create a dataset files from the available images
dataset_files = create_dataset_files(img_dir, dataset_dir,
split_size=1000,
num_threads=1,
resize=input_size)
### Or load existing .npz dataset files
dataset_files = [os.path.join(dataset_dir, f)
for f in os.listdir(dataset_dir)
if os.path.isfile(os.path.join(dataset_dir, f))
and f.endswith('.npz')]
### Get the training and test set randomly out of the dataset with a split of 70/30
train_set, test_set, classes = load_data(*dataset_files, split_percentage=0.7)
print('Loaded {} training images and {} test images. Classes: {}'.format(
train_set.shape[0], test_set.shape[0], classes))
# Example output:
# Loaded 623 training images and 267 test images. Classes: ['negative' 'positive']
# Extract training set and test set images and labels
train_images = np.asarray([item[0] for item in train_set])
train_labels = np.asarray([item[1] for item in train_set])
test_images = np.asarray([item[0] for item in test_set])
test_labels = np.asarray([item[1] for item in test_set])
### Inspect the first 25 images in the training set
plot_images_grid(images=train_images, labels=train_labels,
classes=classes, rows=5, cols=5)
### Declare the model
# - Flatten input
# - Layer 1: 50% the number of pixels per image (RELU activation)
# - Layer 2: 20% the number of pixels per image (RELU activation)
# - Layer 3: as many neurons as the output labels
# (in this case 2: negative, positive) (Softmax activation)
model = keras.Sequential([
keras.layers.Flatten(input_shape=train_images[0].shape),
keras.layers.Dense(int(0.5 * train_images.shape[1] * train_images.shape[2]),
activation=tf.nn.relu),
keras.layers.Dense(int(0.2 * train_images.shape[1] * train_images.shape[2]),
activation=tf.nn.relu),
keras.layers.Dense(len(classes), activation=tf.nn.softmax)
])
### Compile the model
# - Loss function:This measures how accurate the model is during training. We
# want to minimize this function to "steer" the model in the right direction.
# - Optimizer: This is how the model is updated based on the data it sees and
# its loss function.
# - Metrics: Used to monitor the training and testing steps. The following
# example uses accuracy, the fraction of the images that are correctly classified.
model.compile(optimizer='adam',
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
### Train the model
model.fit(train_images, train_labels, epochs=3)
# Example output:
# Epoch 1/3 623/623 [======] - 0s 487us/sample - loss: 0.2672 - acc: 0.8860
# Epoch 2/3 623/623 [======] - 0s 362us/sample - loss: 0.0247 - acc: 0.9936
# Epoch 3/3 623/623 [======] - 0s 373us/sample - loss: 0.0083 - acc: 0.9984
### Evaluate accuracy against the test set
test_loss, test_acc = model.evaluate(test_images, test_labels)
print('Test accuracy:', test_acc)
# Example output:
# 267/267 [======] - 0s 243us/sample - loss: 0.0096 - acc: 0.9963
# Test accuracy: 0.9962547
### Make predictions on the test set
predictions = model.predict(test_images)
# Plot a grid of 36 images and show expected vs. predicted values
plot_results(images=test_images, labels=test_labels,
classes=classes, predictions=predictions,
rows=9, cols=4)
### Export as a Tensorflow model
export_model(model, tf_model_file,
properties_file=tf_properties_file,
classes=classes,
input_size=input_size)
If you managed to execute the whole notebook correctly you’ll have a file named
ir.pb under models/ir/tensorflow. That’s your Tensorflow model file, you can
now copy it over to the RaspberryPi and use it to do predictions:
scp $BASEDIR/models/ir/tensorflow/ir.pb pi@raspberry:/home/pi/models
Detect people in the room
Once the Tensorflow model has been deployed to the RaspberryPi you can replace the previous cronjob that stores pictures at regular intervals with a cronjob that captures pictures and feeds them to the previously trained model